Monitor |
|
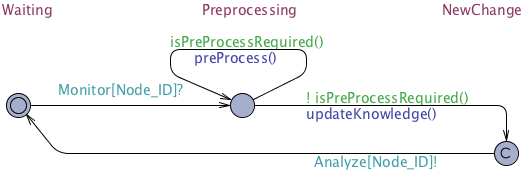 Fig. 1: Event triggered Monitor template |
A Monitor behavior collects information from the managed system and possibly the environment to update the Knowledge of the feedback loop. Before updating the Knowledge, the Monitor behavior may preprocess the collected data. Examples of preprocessing are standardization of data, filtering, data aggregation, etc. We provide Monitor behaviors both with event (top) and time triggering (bottom). Monitor resides in the Waiting state until it is triggered to act. An event triggered Monitor is activated by a probe (either from the managed system or the environment) via the Monitor[Node ID]? signal. A time triggered Monitor periodically (t==Period) activates a probe via monitor(). If necessary, the new collected data is preprocessed (if isPreprocessingRequired() then preprocess()). Then the Knowledge is updated (updateKnowledge()). Finally, the Analyze behavior is notified about the update (Analyze[Node ID]! from the NewChange state). This latter triggering is optional, as the Analyze behavior may use time triggering. |
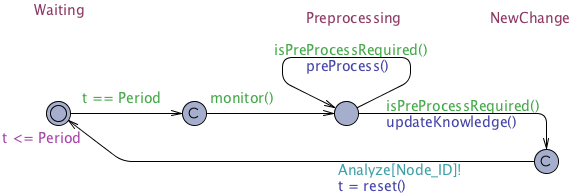 Fig. 2: Time triggered Monitor template |
|
Analyze |
|
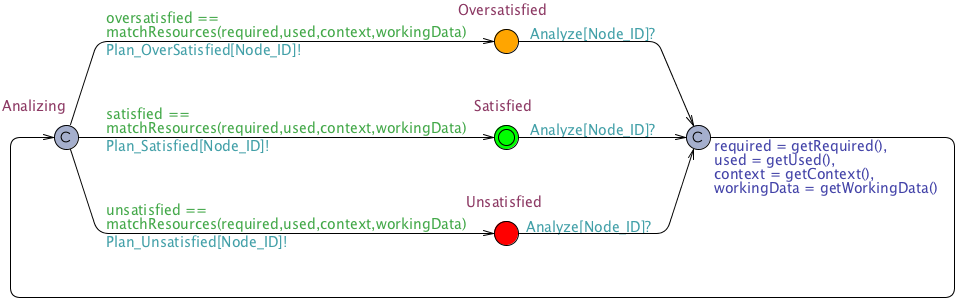 Fig. 3: Event triggered Analyze template |
The Analyze behavior is responsible to determine whether adaptation actions are required. To that end, the Analyze behavior matches the required resources with the resources in use, taking into account the current context and working data. Analysis can result in three primary conclusions. The current situation is Satisfied when the managed system possesses the resources it requires to realize its goals. The situation is Undersatisfied when the system lacks resources, and Oversatisfied when the system has redundant resources. We provide behavior templates for an analyze behavior with event triggering (Analyze[Node ID]?) and time triggering (t==Period). To perform analysis, the Analysis behavior collects the required knowledge (getRequired(), getUsed(), and getContext(), getWorking-Data()) and then matches resources (matchResources()). The results of the analysis are then communicated to the Plan behavior (Plan OverSatisfied[Node ID]!,Plan Satisfied[Node ID]!, Plan UnSatisfied[Node ID]!). Analysis interacts with Plan through signals, but this is optional. |
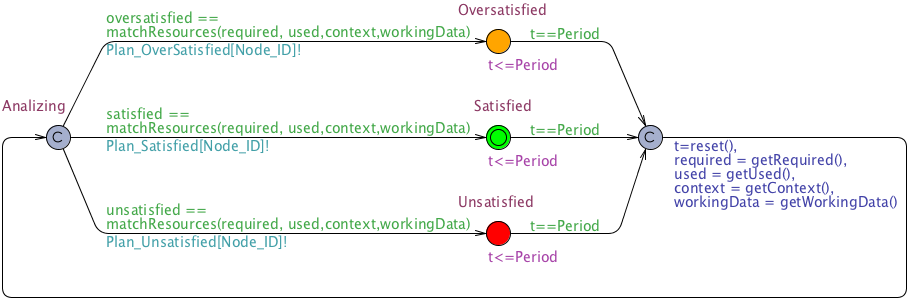 Fig. 4: Time triggered Analyze template |
|
Plan |
|
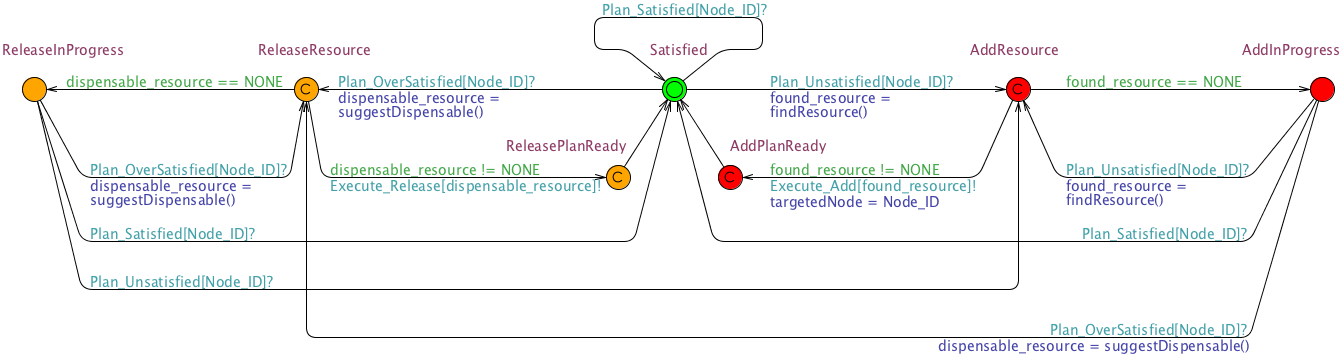 Fig. 5: Event triggered Plan template |
The Plan behavior is responsible for planning mitigation actions when needed to bring the managed system in a desired state (i.e. Satisfied). There are two cases that require planning: either there is a need to add resources (i.e., the system state is in an unsatisfied situation), or resources may be released (when the system is in an oversatisfied state). We present two reusable templates for a Plan behavior. With time triggering, the planner periodically checks what it needs to do (x==planToDo() condition), and creates an appropriate plan when needed (ReleaseResource or AddResource). Planning the release of resources is specified in the left part of the figures of the Plan behavior (releaseResource(dispensible_resource)). In case, a resource is ready for release, a plan is generated, added to Knowledge and Execute is informed. In case no resource is ready for release, Plan periodically re-checks. Planning can be interrupted if conditions change and adaptation is no longer required (satisfied == planToDo() or add == planToDo()). Planning the addition of resources is specified in the right part of the figure findResource(). If Plan finds a suitable resource (found_resource != NONE) it generates a plan, adds it to the Knowledge, and communicates with Execute. Otherwise, Plan rechecks periodically to see whether a resource is available. As for releasing resources, planning the addition of a resource can be interrupted when adaptation is no longer required. |
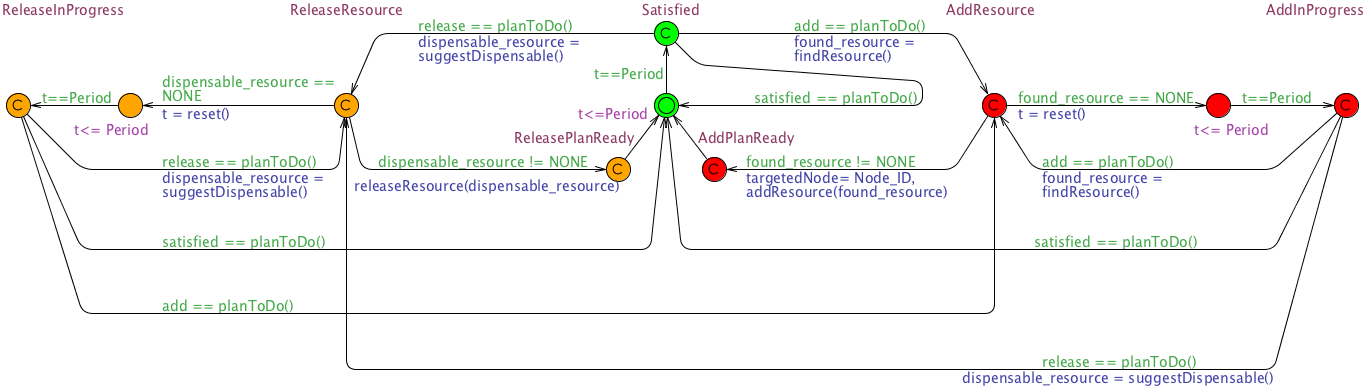 Fig. 6: Time triggered Plan template |
|
Execute |
|
 Fig. 7: Event triggered Execute template |
The Execute behavior is responsible of executing adaptation plans. Plans an contain multiple actions to be invoked to the managed system. We provide two reusable templates for the Execute behavior, respective with time and event triggering. The left part of the figures with the templates specify the execution of plans to release resources. Actions are only executed when the managed system is ready for it isSystemReadyToTakeAction()). Actions are executed sequentially by invoking an effector ( invokeNextAction()). When the complete plan is executed, the behavior returns to wait for the next plan to be executed (PlanCompleted). |
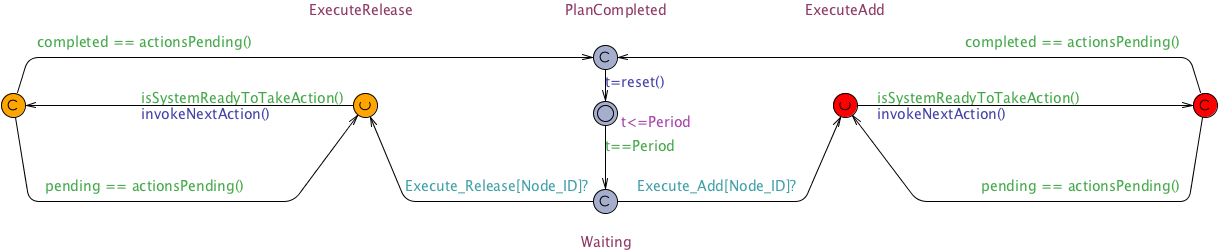 Fig. 8: Time triggered Execute template |
|
Properties
Adaptation Goal Specification Property
The adaptation goal specification property allows to verify when the self-adaptative system requires adaptation, eventually the adaptation will be realized by the MAPE-K loop.
P1: Analyze(X).Unsatisfied --> Analyze(X).Satisfied || Analyze(X).Oversatisfied
Intra-Behavior Specification Properties
Intra-behavior properties allow verification of properties of individual MAPE behaviors, independently of the other MAPE behaviors.
P2: ConcernKnowledge[X].required_resources > ManagedSystemKnowledge[X].used_resources
--> Analyze(X).Unsatisfied
P3: Plan(X).AddResource --> Plan(X).Satisfied
P4: Plan(X).ReleaseResource --> Plan(X).Satisfied
P5: Execute(X).ExecuteAdd --> Execute(X).PlanCompleted
P6: Execute(X).ExecuteRelease --> Execute(X).PlanCompleted
Inter-Behavior Specification Properties
Inter-behavior properties allow verification of properties about the interaction between multiple behaviors of a MAPE-K loop.
P7: Analyze(X).Unsatisfied --> Plan(X).AddResource
P8: Plan(X).ReleasePlanReady --> Execute(X).ExecuteRelease
P9: Plan(X).AddPlanReady --> Execute(X).ExecuteAdd
|
Last update: November 2, 2013 - feedback |