Here we present concrete models and properties based on the MAPE-K Templates for the specification of self-adaptation in a mobile learning application.
Download: models for Uppaal.The mobile learning application supports outdoor learning activities, where students use GPS-enabled mobile devices. A learning activity takes place in the context of a lecture (of 1 or 1.5 hour) and is composed of a set of tasks (typically 4 to 8 tasks). An example of a learning activity is to measure and calculate properties of triangles, and one concrete task is to use triangulation techniques to find locations on the field given the three side measurements of a triangle, and having two of the triangle locations already marked on the field. Fig. 1 shows a use case scenario, where three groups of students (represented by MVDs) perform tasks of a learning activity.
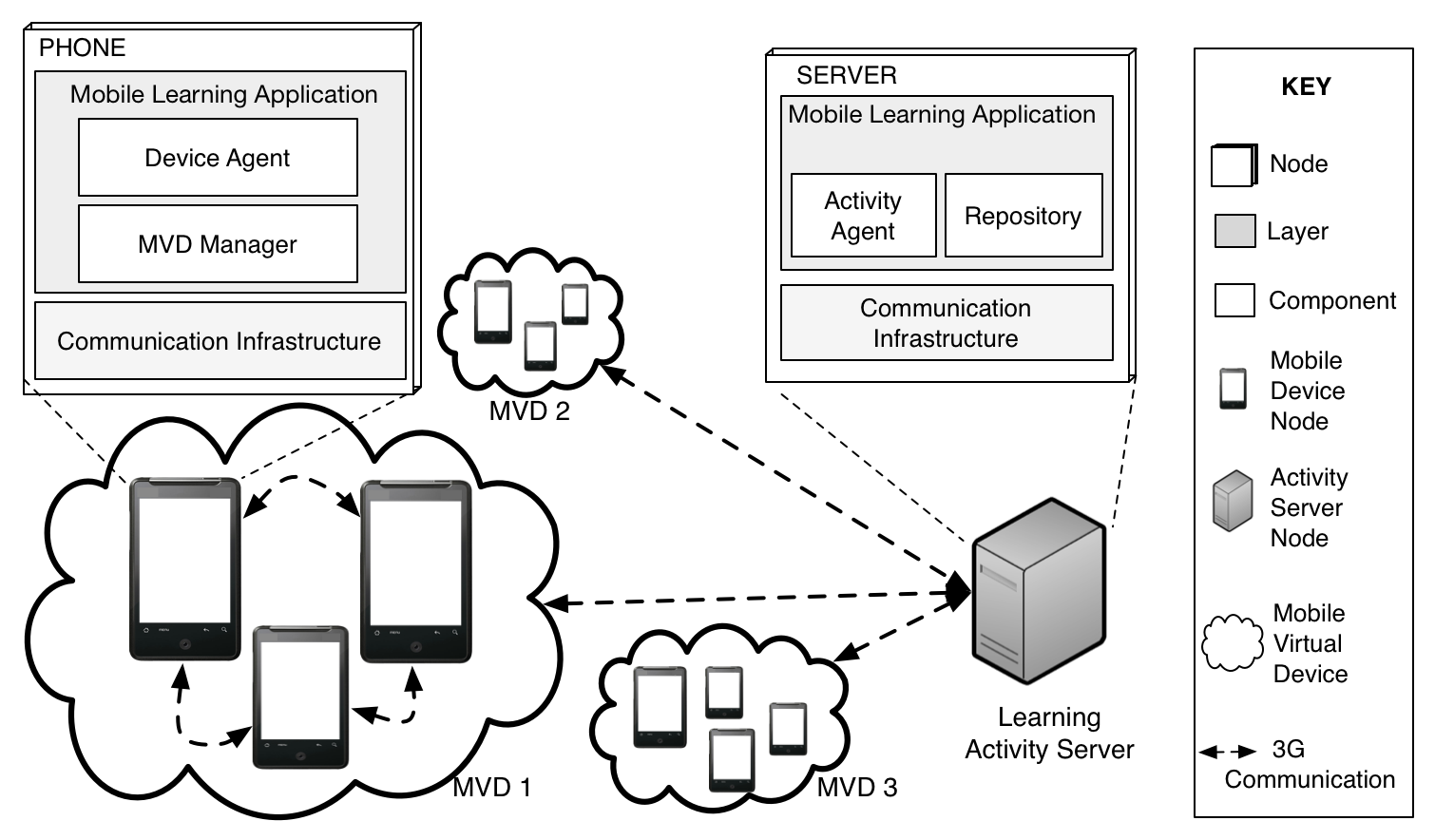
Fig. 1: Use case scenario of the mobile learning application
-
The application is conceived as a distributed agent-based
system. A Device Agent deployed on each mobile phone provides
the learning services to the student (gathering locations,
calculating distances, etc.). The device agents of a group that
work on the same tasks form an Mobile Virtual DeviceMVD.
Within an MVD, one of the agents is elected as master,
while the others serve as slaves.
Task management is the responsibility fo the Activity Agent that
resides at a server. Master agents communicate via 3G with the
activity agent using a Communication Infrastructure. Master agents receive new tasks from the
activity agent and report the results back when a task is completed.
-
Changing conditions in the environment may affect the quality of GPS services.
Consequently, the number of devices in a MVD may become insufficient to realize the
activity requirements. Hence, it becomes crucial to provide
self-adaptation mechanisms to enable robustness of the application.
-
The managed system, which compromises the software to support the application functionality,
has been extended with two MAPE-K loops that deal with two complementary
concerns. A first MAPE-K is concerned with managing the availability of the
GPS service based on the actual GPS service quality. The second loop deals with managing
the required number of GPS services of the current task for the MVD.
We will focus on the behaviors of the second MAPE-K loop.

Fig. 2: Structural architecture of the Mobile Learning application.
Two MAPE-K loops are present to deal with two concerns: GPS quality (left loop), Organization (right loop)
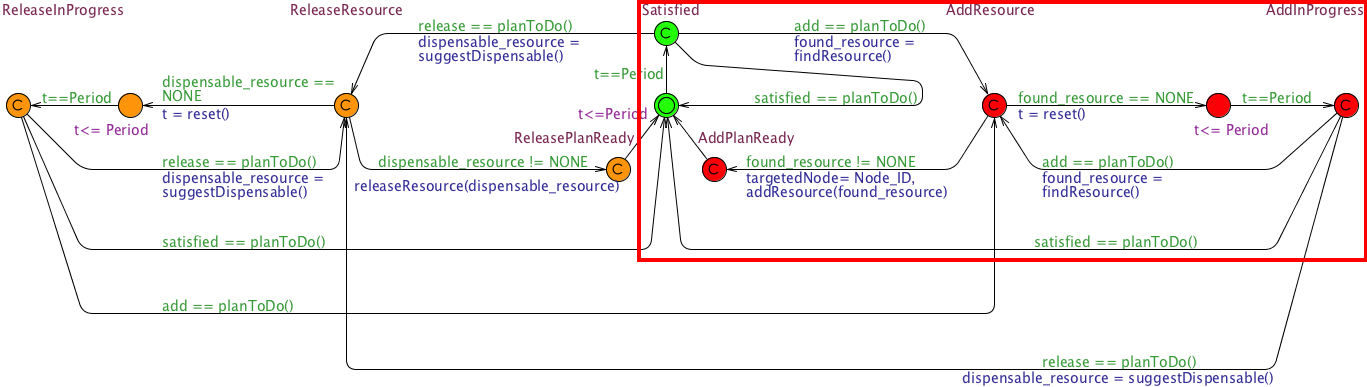
The second MAPE loop (MVD Concern) is distributed over the devices of the MVD. This MAPE loop uses a master-slave pattern. If the master detects that the number of GPS services in the MVD is not sufficient for the current task, it looks for an additional service. If there is a free GPS service available, the device that provides that service is dynamically added to the MVD, if not, the master periodically re-checks. For additional information, we refer to the SEAMS 2013 paper.

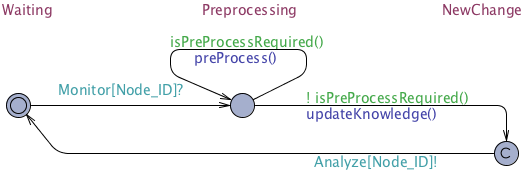
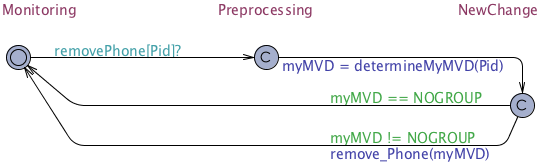
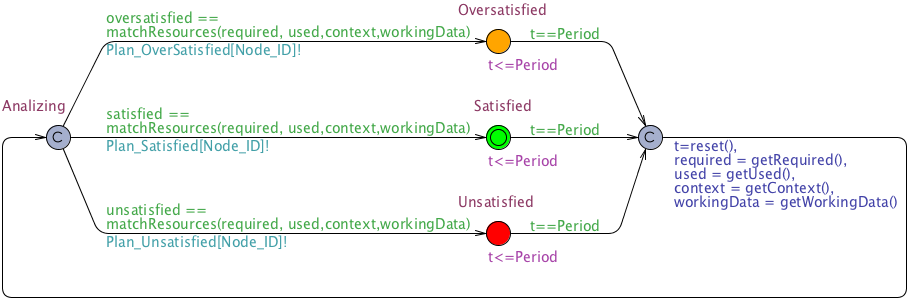
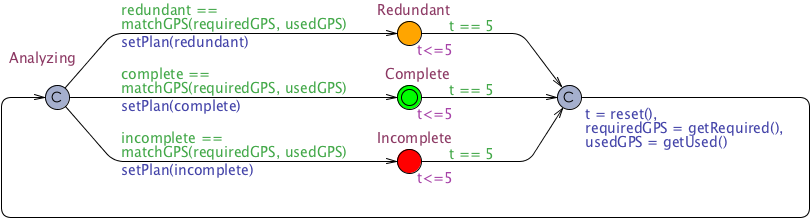
Fig. 3: Structural architecture of the Mobile Learning application.
Two MAPE-K loops are present to deal with two concerns: GPS quality (left loop), Organization (right loop)
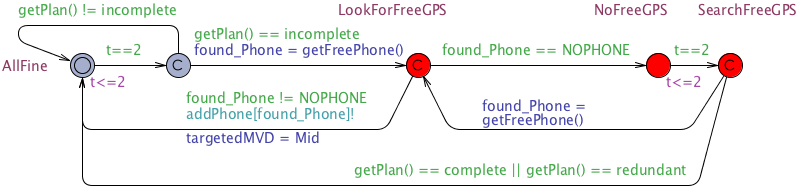
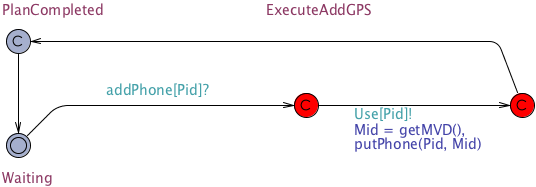
- States of behaviors are annotated in red.
- Invariants that need to be satisfied in certain states are annotated in purple.
- Conditions to enable firing of transitions between states are annotated in green.
- Signals used for communication between behaviors are annotated dark blue.
- Functions associated with behaviors are annotated in light blue.